層時間と同時性
相対論では、遠方の「いま」は一意に決まりません。端末を同時に扱うなら、そのズレを管理する仕組みが必要になります。
相対論の同時性のズレは、端末どうしの「層のズレ」として表に出ます。
そこで層参照(層時間)を導入します。ただし層は恒星系程度のローカル概念として扱い、星間ではアンカー参照へ切り替えます。
前章では「端末が増えるほど同期が重くなる」を式で置きました。しかし、同期とは何に対して行うのでしょうか。
相対論の世界では、遠方の「いま」そのものが揺れます。揺れたまま運用すると、端末のログ・鍵・責任の起点が自然に分岐します。
この章では、相対論の同時性のズレをまず図で押さえ、そのズレを運用上の参照値として扱うために層参照 \(\ell\) を導入します。
以降の式は世界の真理の主張ではなく、物語内で制度や手続きを作るための最小の運用モデルとして読んでください。
- 相対論側:遠方の「同時」は一意でない(図5-1)。
- 運用側:アンカーで「同時」を規格化し、端末はズレ \(\ell\) を申告する(図5-2・式(8))。
- 制度側:手続きが許容ずれ \(\delta_{\max}\) を要求し、必要なら直前に再同期する。
相対論:同時刻は、移動の仕方で変わる
同じ場所に会合しても、そこへ来るまでの運動(速度)が違うと、「地球の同時刻」が違って見えます。
これは「誰が正しい」ではなく、同時刻という切り方自体が相対的だからです。
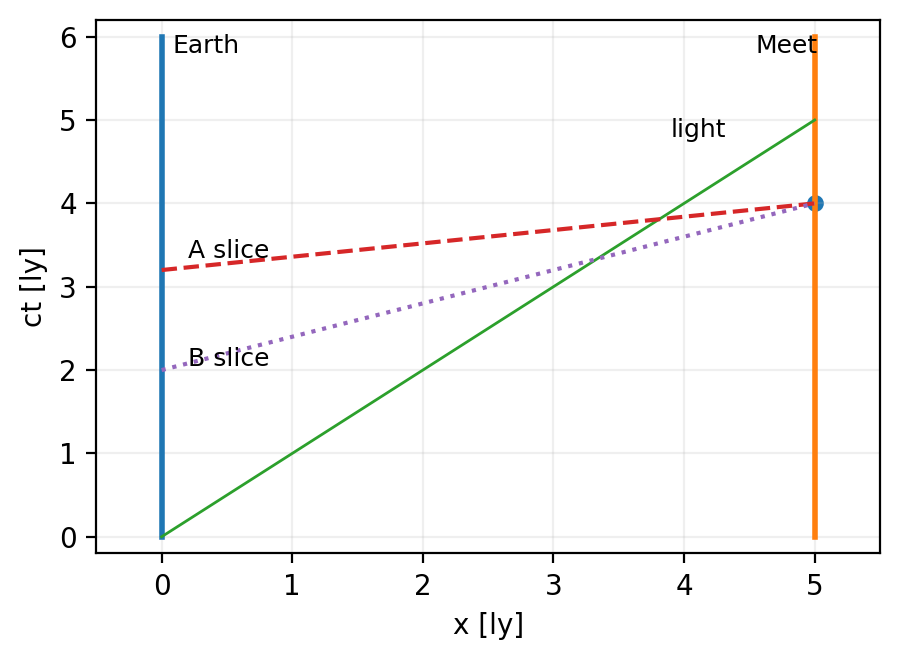
ミンコフスキー図では、縦軸が時間(ct)、横軸が距離 x です。光は45度で進み、観測者の「時間の進み(世界線)」はその内側に収まります。
ある観測者にとっての「同時刻線」は、その観測者が“いま”と見なす切り口で、速度が違うと傾きも変わります。
図5-1では、会合点(Meet)で A と B が同じ出来事を共有しています。それでも A の同時刻線と B の同時刻線は一致せず、地球の世界線と交わる点(=「地球でいま何時か」の割り当て)がずれます。
このずれは、誰かが間違えているのではなく、同時刻の定義が複数あることから必然的に出ます。
重要なのは「会合して合意した」だけでは、遠方の参照値が揃わない点です。
ずれの大きさは、距離が遠いほど、また相対速度が大きいほど増えます。次の式(8a)は、その増え方の目安です。
同時性のズレの大きさ(目安)
厳密にはローレンツ変換から導けますが、ここでは「規模(オーダー)」が分かれば十分です。
低速(|v|≪c)の範囲では、同時性のズレはおおむね距離と速度に比例します。
式(8a)の \(\Delta x\) は2地点の距離、v はそれらを比べる観測者の速度、c は光速です。
これは「時計が遅れる(時間の遅れ)」ではなく、「遠方の“いま”の切り方が傾く(同時性の相対性)」によるズレです。
v=0 ならズレは消え、距離が0でも当然ズレません。符号は取り方で変わるので、ここでは「どれくらいズレうるか」だけを使います。
\(\Delta x\) が 1 光秒(約 3×108 m)、|v| が 1 km/s でも、\(|\Delta t_{\mathrm{sim}}|\) は数マイクロ秒(数×10-6 s)になります。
署名・ログ・鍵合わせのように“順序”を要求する手続きでは、このマイクロ秒がそのまま破綻の芽になります。
距離が 1 ly、|v|=0.01c なら \(|\Delta t_{\mathrm{sim}}|\) は約 3.7 日。星間では「同時」が制度として扱われる理由になります。
つまり「遠方の端末に対して地球時刻で命令を出す」という発想自体が、相対論では設計負債になります。
地球側では同じ基準で記録しているつもりでも、遠方の端末側では「その時刻の意味」が揺れるからです。
そこでこの世界では、地球時刻そのものではなく、層参照で“同時”を扱うようにします。層参照は「揺れ」を消すのではなく、揺れを管理可能な量として参照値に押し込みます。
精霊が「地球の端末」と「遠方の端末」を同時に扱う(=両方を“今”として扱う)とき、
相対論の同時性の曖昧さが、そのまま「端末間の不一致」として出ます。
- 鍵合わせが一致しない(署名・ログが壊れる)。
- 条約や責任の起点(いつ・どこ)が食い違う。
- 同時に開くはずの扉が「片方だけ」開く。
この不一致は「遠方で起きた出来事を、地球の時刻で一つの基準にまとめて書く」ほど露骨になります。
逆に言えば、参照の取り方(基準)を先に決めてしまえば、同時運用は制度として扱えます。
層参照:同時性のズレを管理する参照値
層時間は「宇宙に絶対時間が生えた」という主張ではありません。
相対論で揺れる同時性を、端末運用のために一つに決めて固定する規格です。規格を決める役がアンカーです。
アンカーは、自然物理の一部ではありません。共同体が「この範囲ではこの切り方を採用する」と宣言し、端末がそれに従うための合意点です。
港の航法局が置く標準でもよいし、精霊が守っている古い石柱でもよいし、軍の基準局でもよい。
層時間の狙いは、相対論の曖昧さを消すことではなく、曖昧さを運用に押し込めることです。
「同時」の定義をアンカーに固定し、端末は自分がどれだけズレているか(層参照)を申告し、必要なら同期の反作用を払ってズレを戻します。
アンカー参照位相(基準)
この恒星系で合意した「いま」。航法・条約・ログの基準になり、端末はここに合わせる。
端末の層位相(個体)
移動や環境でずれる。ずれを参照値として管理し、必要なときだけ同期(補正)する。
図5-2の上段が“基準”、下段が“個体”です。現実の世界で「標準時」と「各人の時計」があるのと同じで、標準があるからズレが測れます。
層参照 \(\ell\) は、そのズレを角度として数えたものです。
式(8)は、層参照 \(\ell\) [rad] を「アンカーに対するずれ量」として定義しただけです。
\(\ell\) が小さい端末どうしは「同じ層」とみなして運用できます。
\(\ell=0\) は「この端末はアンカーと同じ層にいる」という宣言です。\(|\ell|\) が大きいほど、同時運用は難しくなります。
角度(rad)で持つのは、層のズレが \(2\pi\) 周期で扱える(1周ずれても同じ扱いにできる)ためです。実装上は差を \(-\pi\)〜\(\pi\) に畳んで扱います。
層参照 \(\ell\) と層ずれ \(\delta\) を分ける
層参照 \(\ell\) は「各端末がアンカーからどれだけズレているか」の値です。
いっぽう層ずれ \(\delta\) は「端末どうしの差」で、同期の成立判定に使います。
たとえば i が地上の門、j が軌道上の門だとします。\(\delta_{ij}\) が許容内なら「同時に開門」が成立します。
許容外なら、どちらかが“遅れる”のではなく、そもそも同時の定義が食い違うので、手続きとして不成立になります。
端末が n 個あるなら、すべての組で \(\delta_{ij}\le\delta_{\max}\) を満たして初めて「同時運用」が言えます。
ここでの \(\delta\) は前章の同期コスト式(7)に入るずれと同じものです。
この章では \(\delta\) を単純に差で書きましたが、実際には \(\ell\) は周期量なので「最も短い差」を取ります。
その扱いを明示したものが、後の層トークンで出てくる wrap です。
同じ \(\ell\) でも、アンカーが違えば意味が変わります。
したがってログ・条約・署名に入れるなら、(A, \(\ell_A\)) の形(式(9))で持つ必要があります。
アンカーIDは「場所」だけでなく「その合意が誰に保証されているか」を含みます。支配が変われば基準が変わり、過去の署名が無効になることもある。
だからアンカーは政治・軍事の目標になり得ます(次章のアンカー網へつながります)。
手続きは「許容ずれ」を要求する
層時間の扱いは、“哲学”ではなく手続きの仕様です。何をどこまで揃えるかを決めると、世界の制度が決まります。
許容ずれ \(\delta_{\max}\) は、魔法側の能力ではなく、制度側が決めるパラメータです。
たとえば「条約の発効は \(\delta_{\max}=0.1\) rad 以内でなければ無効」と決めれば、精霊であっても雑な同期では政治に参加できません。逆に、戦場の合図なら多少ずれても問題にならない。
| やりたいこと | 要求(例) | ズレると起きること |
|---|---|---|
| 同時開扉・同時起爆 | \(\delta_{\max}\approx 0.2\,\mathrm{rad}\) | 片方だけ開く/遅れて爆ぜる |
| 条約・監査ログの照合 | \(\delta_{\max}\approx 0.1\,\mathrm{rad}\) | 責任の起点が食い違う |
| 雑な合図(通信) | \(\delta_{\max}\lesssim 1\,\mathrm{rad}\) | 誤差込みで読めればよい |
表の数値はあくまで例です。重要なのは、手続きを設計するときに「どの程度の同時性が必要か」を明文化できることです。
そしてその厳しさが、同期の反作用率(前章式(7))とアンカー網の品質(次章式(10)(11))に直結します。
最小プロトコル:層トークンで“同時”を予約する
遠方の端末に「今すぐ」ではなく「この層で実行せよ」と渡すと、相対論の揺れを層参照で吸収できます。
層同期が強い存在ほど、このトークンの有効期限を長く・許容ずれを小さくできます。
層トークンは「いつ実行するか」を地球時刻で指定せず、「どの層で実行するか」を指定するための小さな札です。
受け取った端末は、自分の層参照を監視し、条件を満たした瞬間に実行します。条件を満たせない場合は再同期するか、失敗として返す。
layer_token := (anchor_id A, layer_ref ell0, tolerance delta_max, ttl dt)
execute_if |wrap(ell_terminal - ell0)| < delta_max within ttl
otherwise resync to A or abortanchor_id A は参照するアンカー、layer_ref ell0 は目標層参照、tolerance delta_max は許容ずれ、ttl dt は札の寿命です。
wrap は \(\ell\) の差を周期(\(2\pi\))として扱い、\(-\pi\)〜\(\pi\) の範囲に畳む関数だと思ってください。
重要な手続きほど ttl を短くし、その直前にだけ強い再同期をかけます。ttl を長くすると配布は楽ですが、その間に層ドリフトが積み上がり、結局はアンカー網(次章)の品質が問われます。
同時開門の手続きが \(\delta_{\max}=0.2\) rad を要求するとします。
- 司令所はアンカー A を選び、(A, \(\ell_0\), \(\delta_{\max}\), ttl) を署名して配布する。
- 各門の端末は受領後、\(\ell\) を監視し、許容内に入った瞬間に開門する。
- 許容内に入らない場合は、直前に短い再同期を挟む(反作用率上限が足りないなら中止)。
この運用だと「何時に開門」という命令は不要で、相対論のズレは層参照へ押し込められます。
層はローカル:恒星系の外へ持ち出すと比較できない
層を宇宙全体で共通の番号にすると、遠方(例:地球とアンドロメダ)で「同じ層が交わる」ことになり、
かえって説明が破綻します。そこで、層は恒星系程度のローカル概念として扱います。
「ならば宇宙全体で1つのアンカーを決めればよい」と思えますが、それをやると、今度は“基準の伝播”が問題になります。
基準の更新を全域に配るには通信が必要で、通信は光速を超えられません。更新が遅れると、どこかの地域では古い基準で運用せざるを得ず、層参照は自然に枝分かれします。
層時間がローカルであることは、設定上の制約であると同時に、世界が破綻しないための安全装置です。
層の“外”では、同時性を制度化できない。だから星間文明は、アンカー網で「制度が届く範囲」を作ることになります。
- 同時刻面は基準の取り方で変わる。銀河スケールで1つに決めると、どこかで不自然が出る。
- アンカーの更新は光速でしか伝わらない。更新が遅れると、層番号が自然に分岐する。
- 結局、文明が扱える“同時”は、アンカーで固定できる範囲(恒星系)にとどまる。
アンカー A
層ずれ ℓA [rad]
アンカー B
層ずれ ℓB [rad]
ℓA と ℓB は、基準(アンカー)が違うので直接は比較できない。
図5-3の \(\ell_A\) と \(\ell_B\) は、同じ数値でも意味が違います。基準となるアンカーが違うからです。
したがって星間で層を比較するときは、「A系のアンカー」から「B系のアンカー」への写像(変換)を作り、どちらの基準にも落とせる形にする必要があります。
この写像は、単発の魔法で永久に固定できません。距離と時間で必ずドリフトするので、定期的な再同期と監査が要ります。次章はその“ドリフトの最小モデル”です。
星間ではアンカー参照に切り替える
恒星系を跨ぐとき、端末は「どのアンカーを基準にしているか」を失いやすい。航行中の船が地球のアンカーを基準にし続けるのは、ドリフトと再同期コストの点で現実的ではありません。
そこで星間では、層参照を必ずアンカーIDとセットにして扱います。
式(9)は、層参照を「アンカーID A と、そのアンカーに対するずれ \(\ell_A\) [rad] の組」として管理する、という意味です。
遠距離で“同じ層”と言いたいなら、アンカー列を辿って写像(再同期)を作る必要があります。
アンカー列を辿って写像を作る、というのは要するに「隣の区間だけは同期できる」前提で、区間ごとの変換を掛け合わせていく、ということです。
変換が長くなるほど誤差(層ずれ)が積み上がるので、アンカー網は“距離を制度として短くする”装置になります。
「会合点」は物理的な座標だけでなく、運用上のアンカー参照を持つ地点です。ここでは会合点のアンカーで「同時」を一旦固定し、そこから地球へ写像します。
- 精霊Aと精霊Bは、地球から会合点へ移動する(移動速度が異なる)。
- 会合点では同じ場所に居られるが、対応する「地球の同時刻」は一致しない(図5-1)。
- 会合は会合点のアンカー参照 (Ameet, \(\ell\)) の中で成立する。
- その後に地球へ戻るとき、地球アンカーへの写像がズレるため、A/B が別の層へ帰還しうる。
このとき、A と B は同じ会合を共有しますが、地球アンカーへ戻す写像が一致しないため「帰ってきた層」が分かれます。
物理的には同じ地球に戻れても、参照上は別の“地球の今”へ戻った、という扱いになり得ます。これが過去接続や時間移動の議論(後章)へつながります。
- 恒星系スケールでも層同期は難しい。星間での同時運用は神話級に限られる。
- 魂の体感時間は通常は層と同方向に進む。逆行・停止は理論上可能でも反作用が極端に重い。
- 自分の魂時間と逆向きの宇宙へは、通常は介入が成立しない(端末運用が組めない)。
まとめると、層時間は「遠方の今を一意にする」魔法ではなく、「遠方の今を一つの基準で扱える範囲を決める」制度です。
次章では、層参照が距離と時間でどのようにズレるか(層ドリフト)をモデル化し、それを抑えるためのアンカー網を説明します。